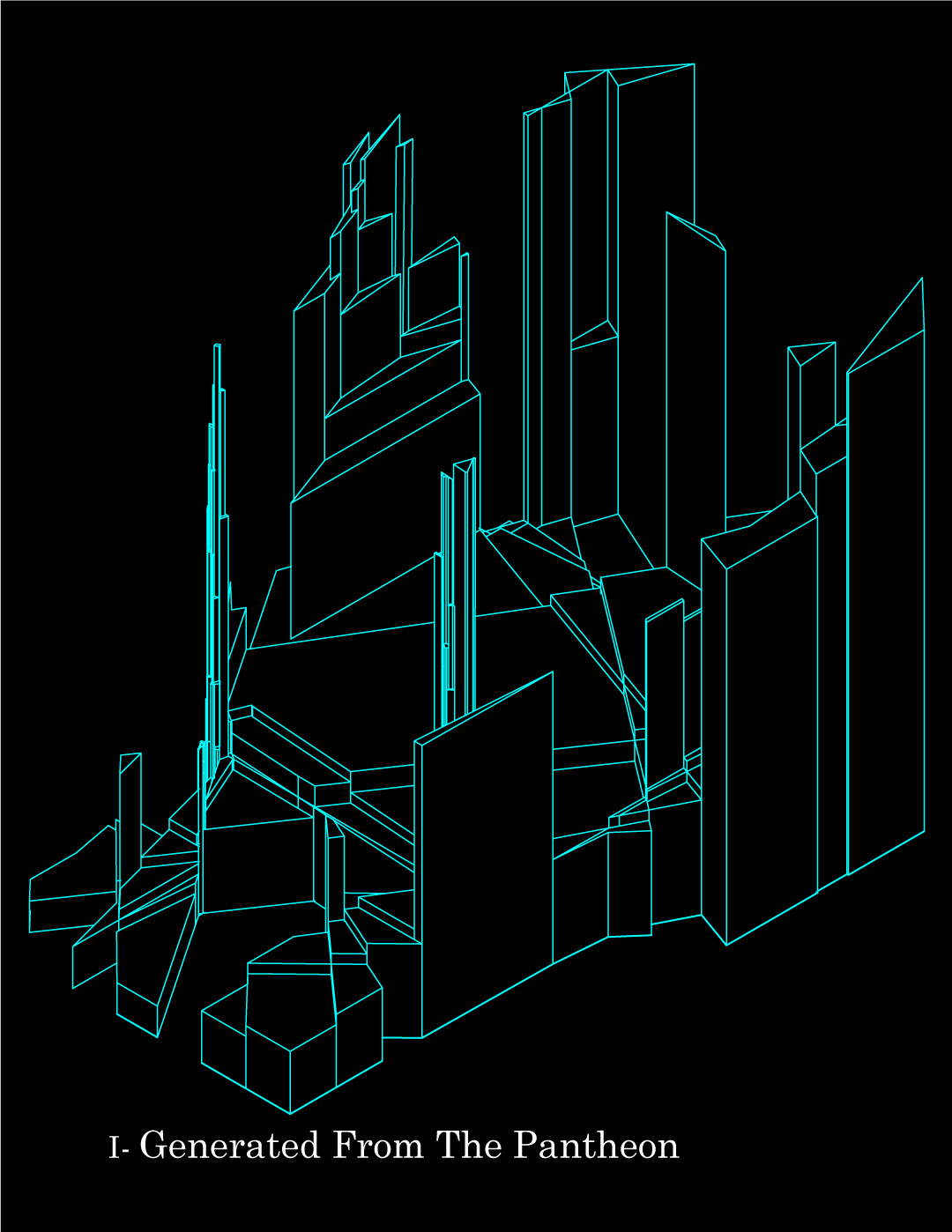
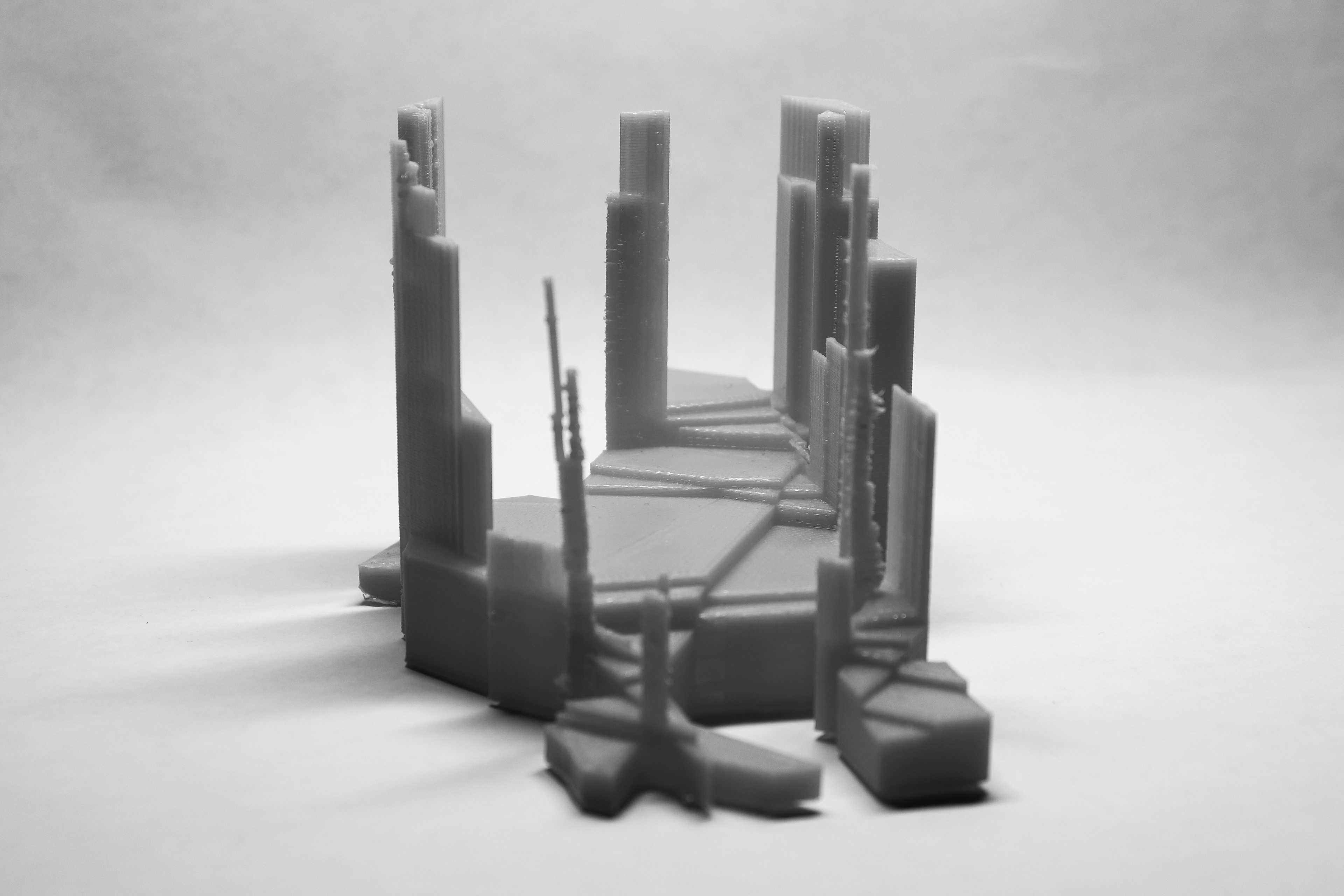
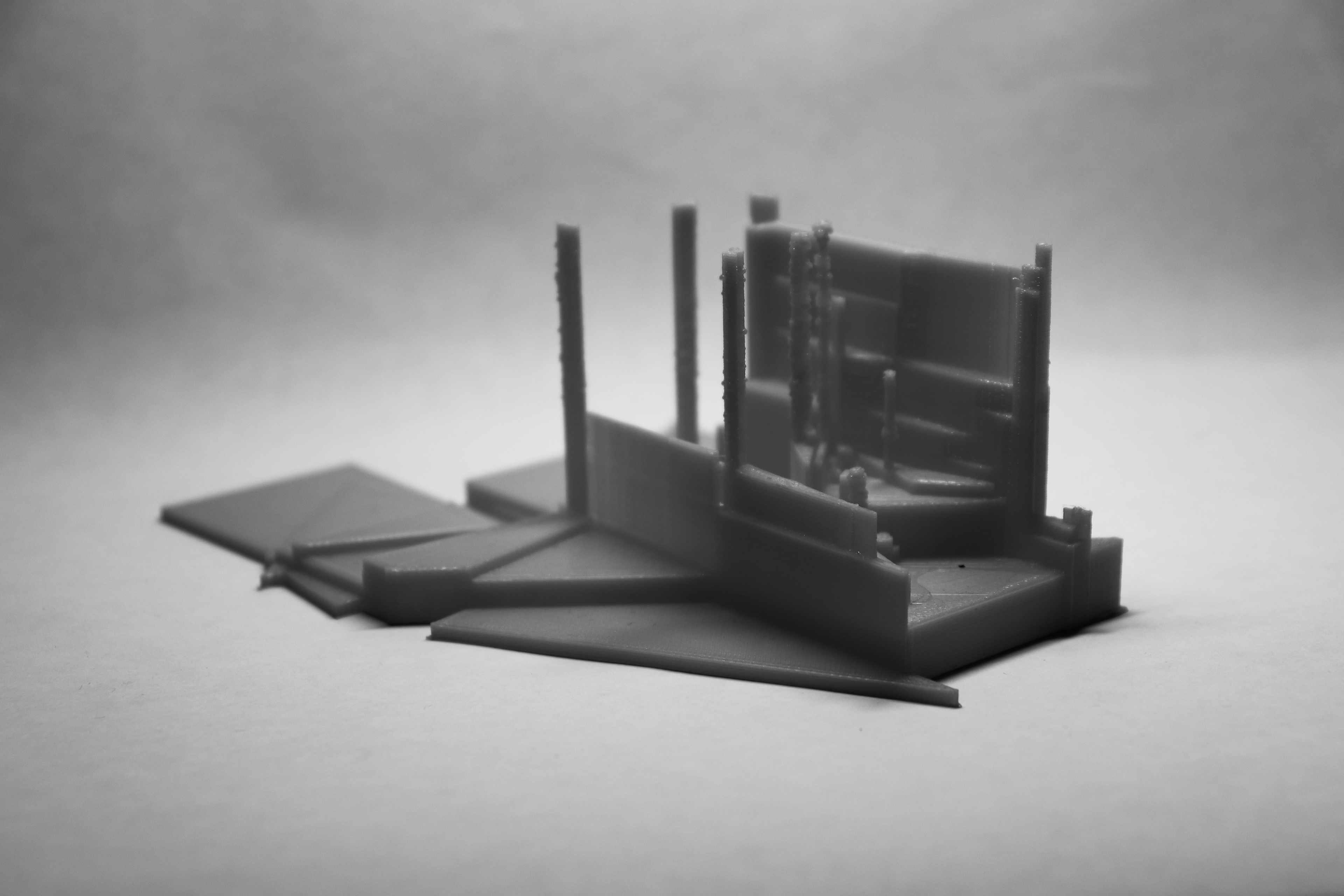
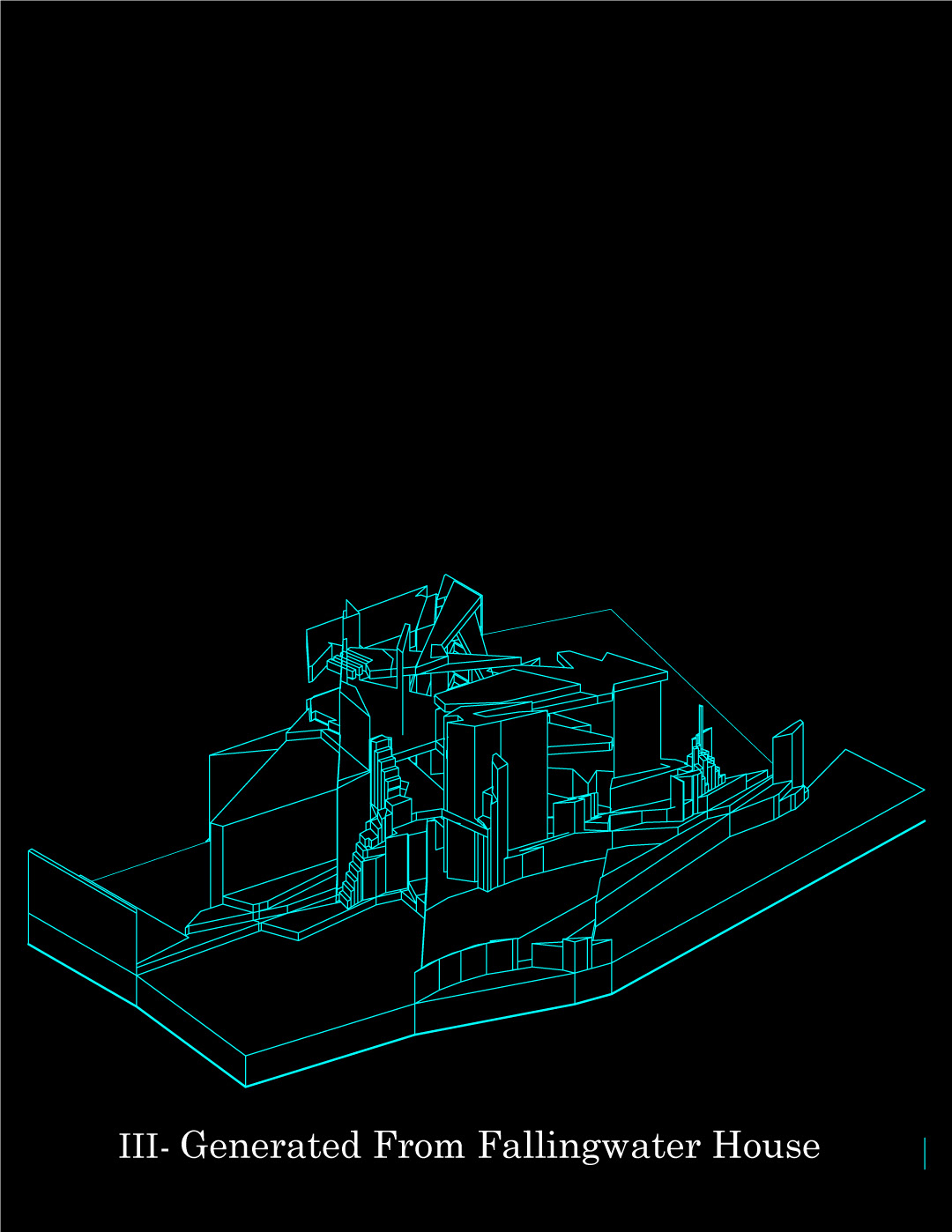
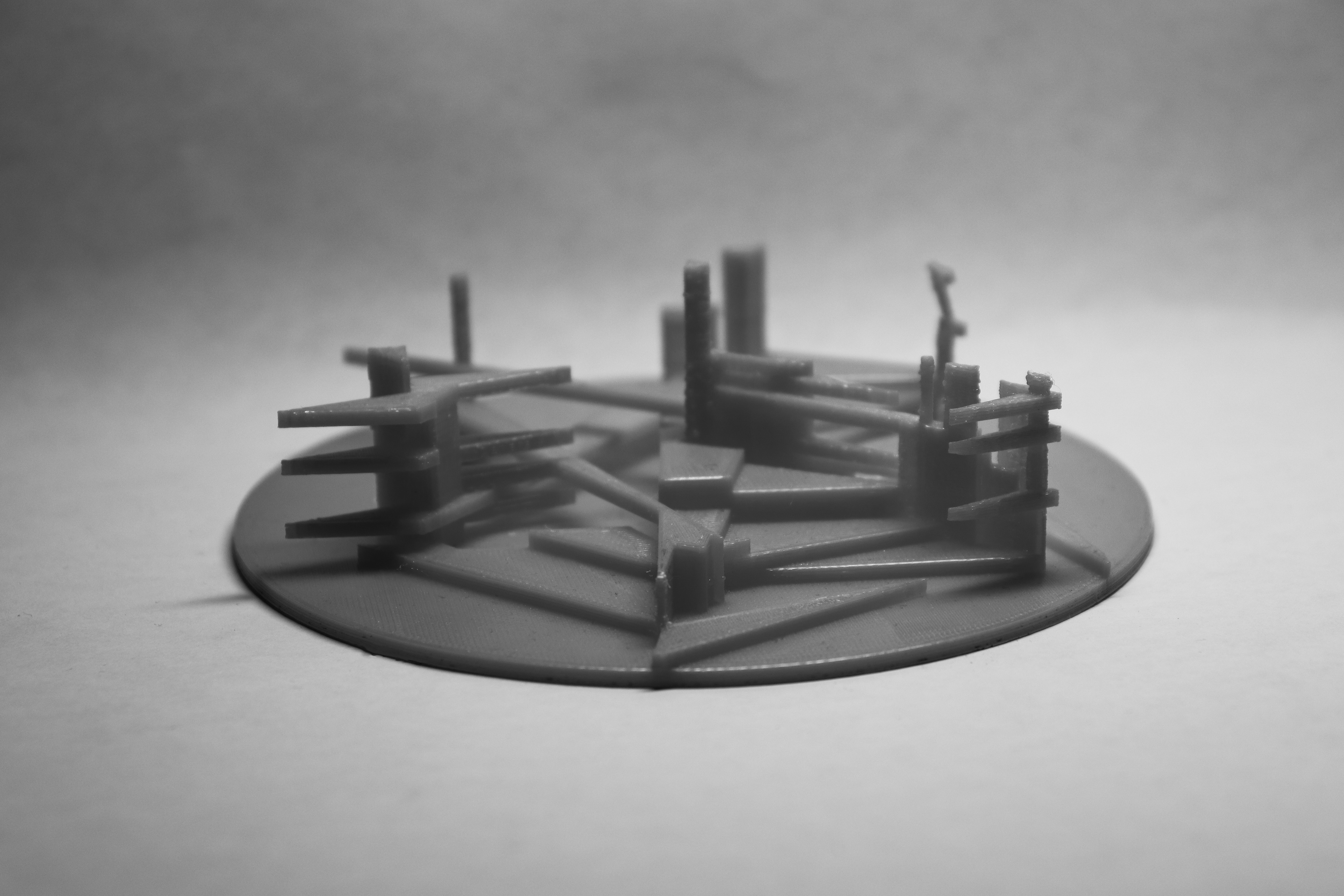
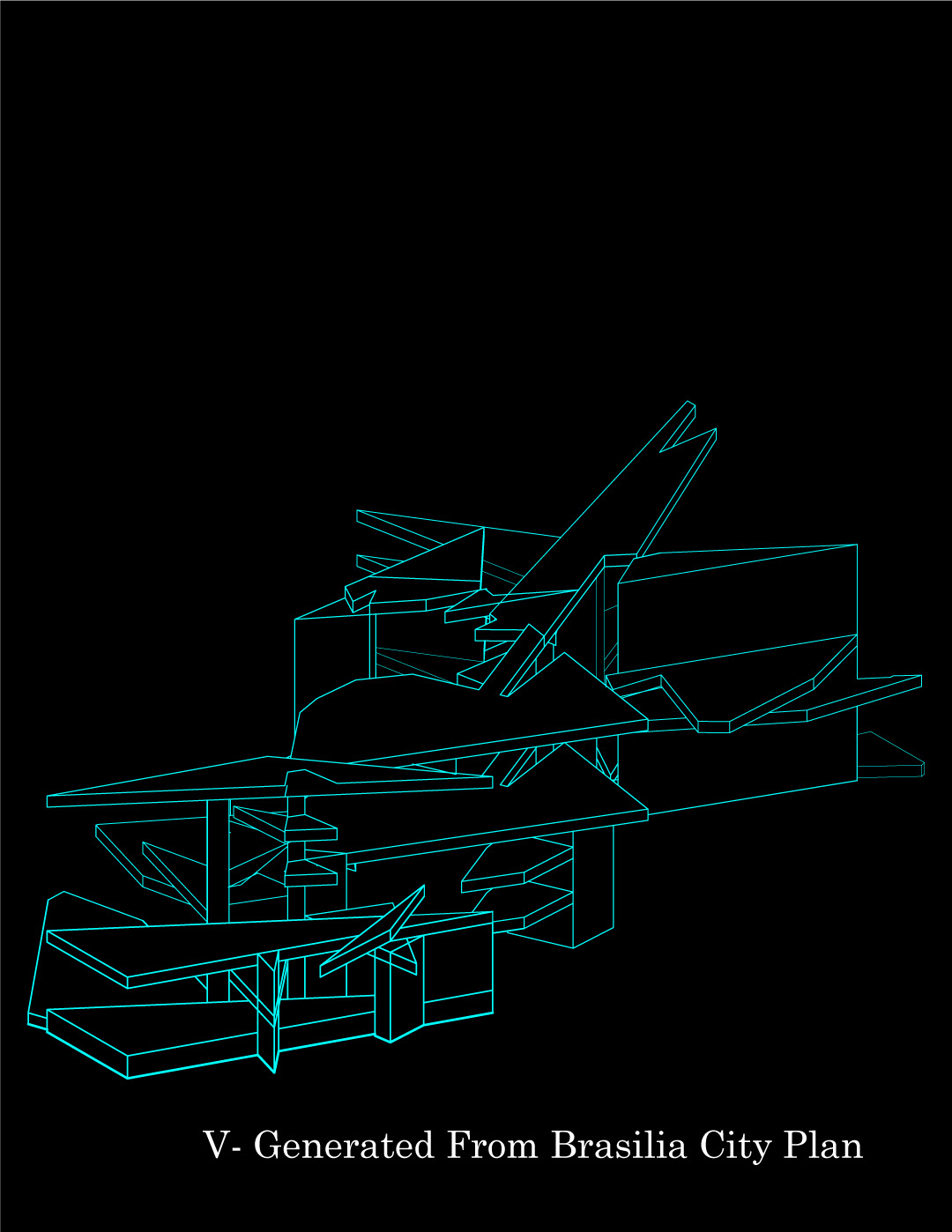
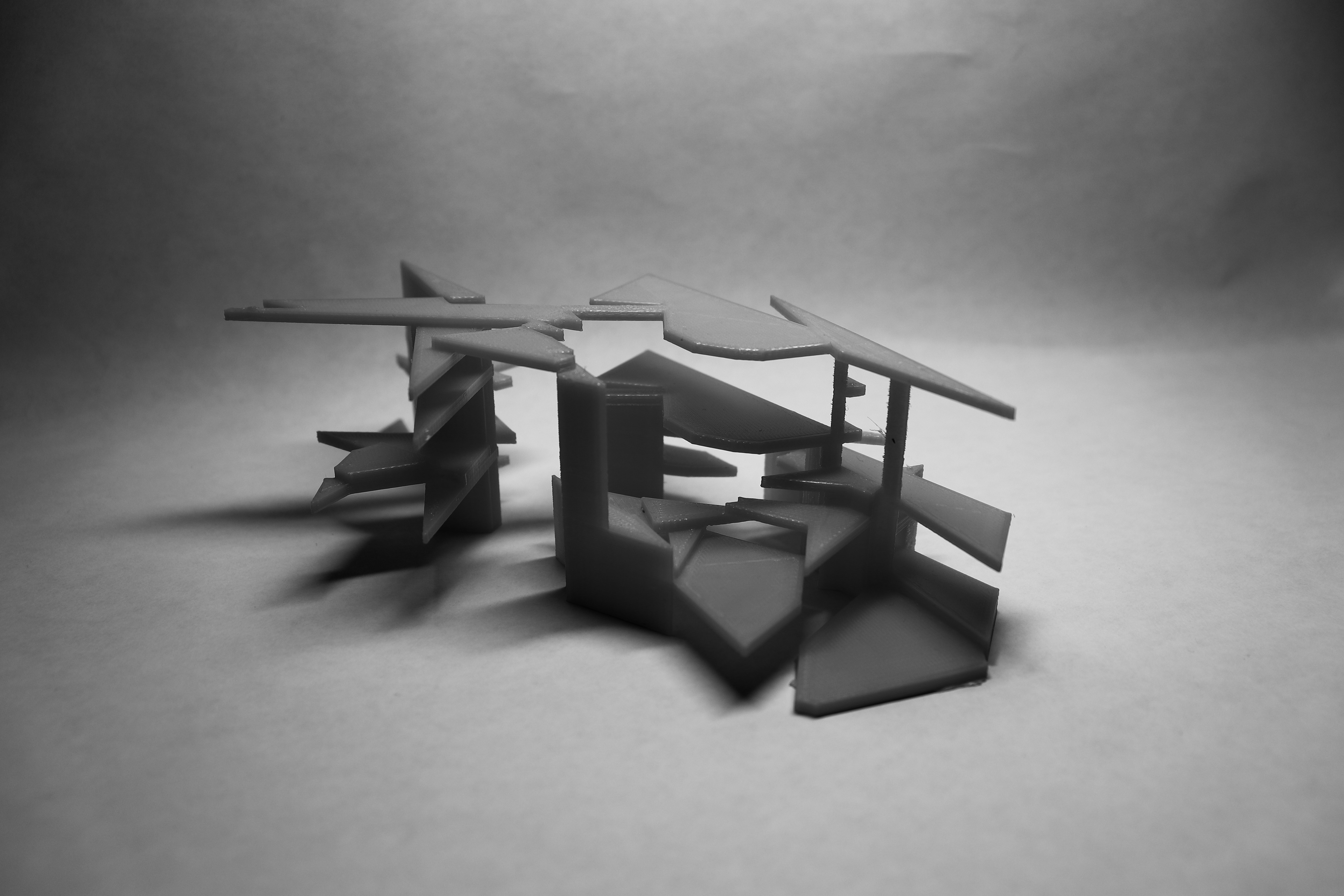
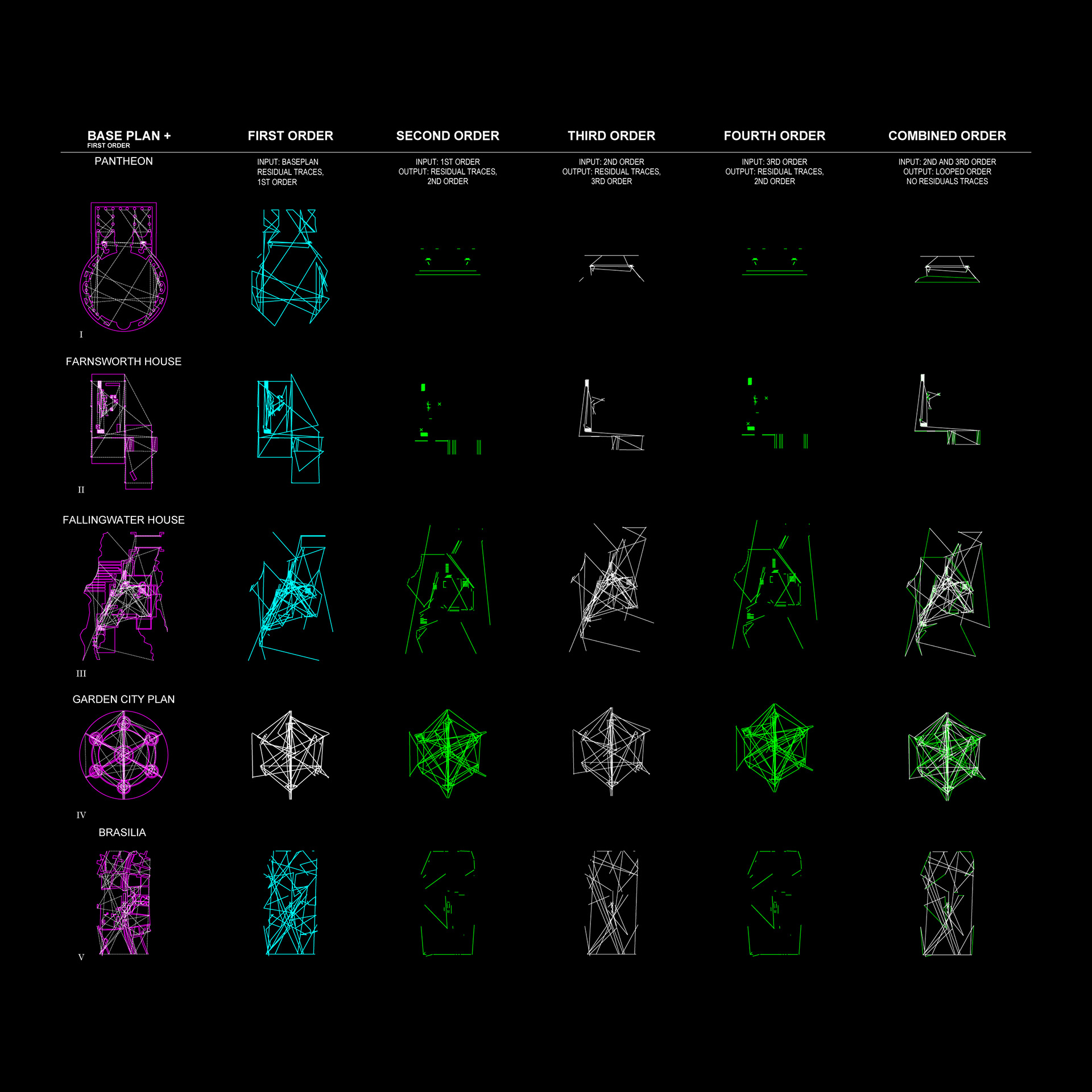
The intent of this project is to produce a curated Architectural Space through the explorations of robotics processes and the abstract geometry resulting from robotic motion. This project is based on the residual traces of floor plans of several iconic buildings. Residual traces are bi-products of the robot’s procedure when drawing a given geometry on a 2D Surface. I examined five different plans as the generator of the first order of residual traces. Second-order traces are then produced by using the first-order residuals as the input geometry for the robot to draw. I discovered that the iteration of this process and the resultant traces rarely repeats the first order of residual traces. And after the third order, the pattern of residual traces usually alternates between the second and third-order. Traces of various orders were utilized to produce curated extruded horizontal planes and vertical surfaces that would be useful for display and exhibition
First Order Curation with 3D Printed Models



Organization of Input and Output Residual Trace Orders
Closing Thoughts
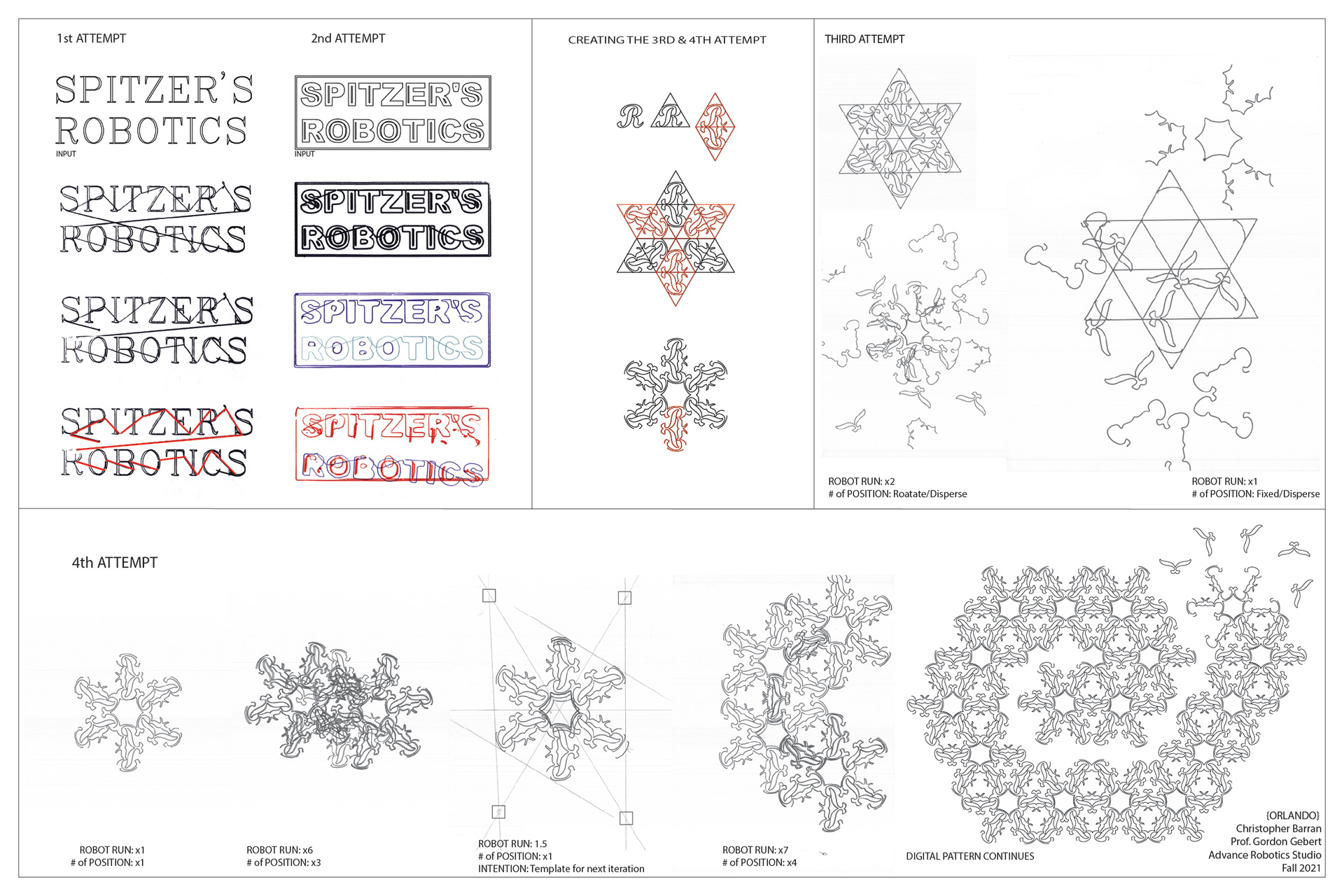
The process of controlling the ABB robot (fig.i) and producing work such as a 2D draw with a sharpie or carving out clay is iterative like any architectural project. The inception of this project came from the first 2D drawing I have drawn (Fig. ii) using ABB Robot. The connecting lines are the “residual trace” To program the ABB Robot to do a complex task, I used grasshopper in rhino 3D in conjunction with Hal Robotics Framework Software, which is also a grasshopper plugin. In the first few steps of this project, I worked in rhino and with grasshopper to simulate a virtual robot on the computer. The virtual robot provides a quick and easy step to test robot instructions before safely operating the physical lab robot. Many times it is a balancing act to work virtually with the robot software and then correct or adjust the actual results physically. This was the first semester working and learning about ABB Robots. It is exciting for experimenting with different thesis-driven projects using robotics. It also provides a great opportunity for advancing our school community’s understanding of the new technology in the field of architecture.

fig. i - ABB Robotic Arm
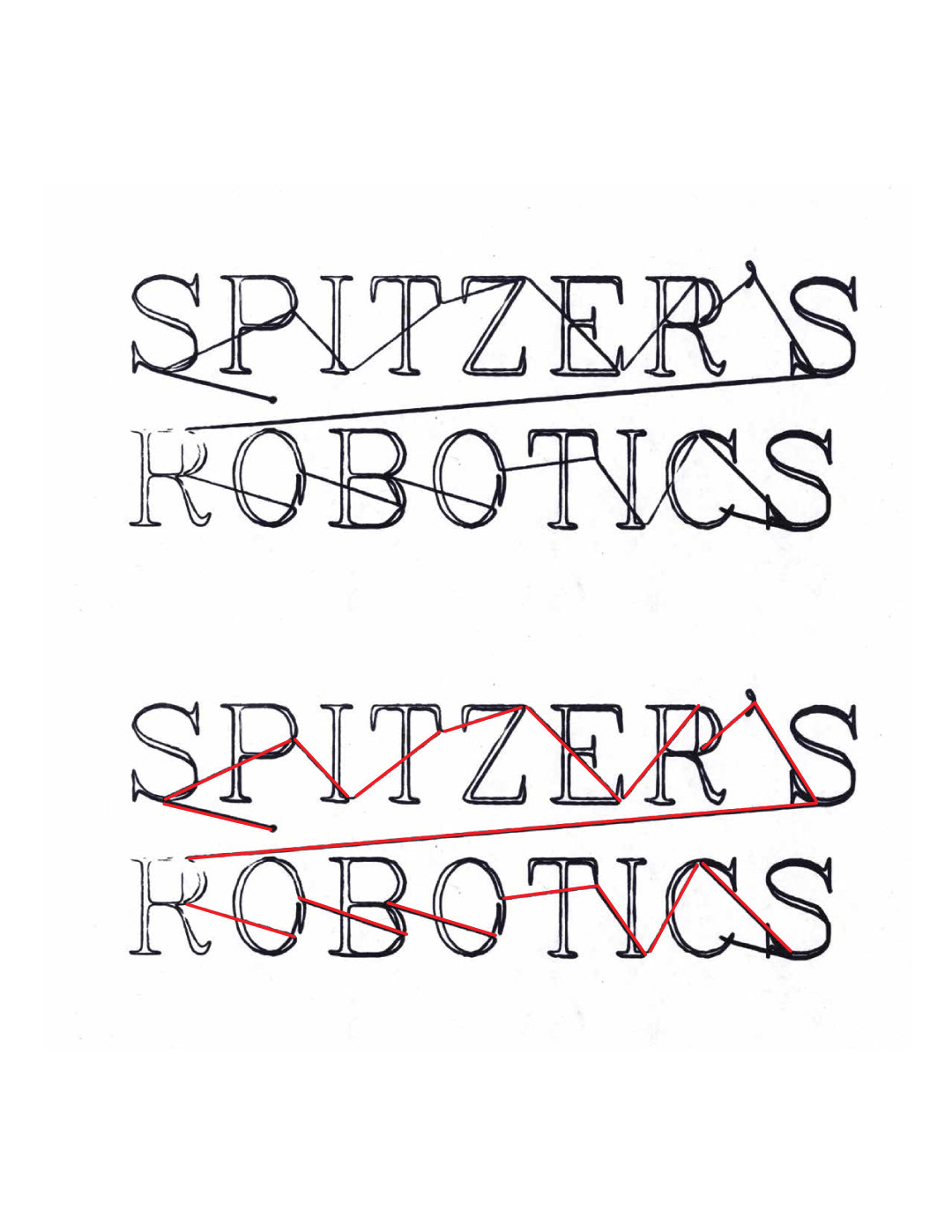
fig. ii - These drawings illustrate a continual motion of the robotic arm. The red lines indicate the unintended residual traces discovered.
FIRST EXPERIMENT WITH ABB ROBOT

Advanced Architecture Studio
Robotics, Architecture, and Practice
Professor Gordon Gebert
Fall 2021 - In-person/Online\
Independent Work